The total electromagnetic force on the charges in volume V \mathcal{V} V
F = ∫ V ( E + v × B ) ρ d τ = ∫ V ( ρ E + J × B ) d τ \mathbf{F}=\int_{\mathcal{V}}(\mathbf{E}+\mathbf{v} \times \mathbf{B}) \rho d \tau=\int_{\mathcal{V}}(\rho \mathbf{E}+\mathbf{J} \times \mathbf{B}) d \tau F = ∫ V ( E + v × B ) ρ d τ = ∫ V ( ρ E + J × B ) d τ Then, the force per volume is
f = ρ E + J × B \mathbf{f}=\rho \mathbf{E}+\mathbf{J} \times \mathbf{B} f = ρ E + J × B Using the Maxwell equations, we can get rid of ρ \rho ρ J \mathbf{J} J
∇ ⋅ E = ρ ε 0 \nabla \cdot \mathbf{E}=\frac{\rho}{\varepsilon_{0}} ∇ ⋅ E = ε 0 ρ ∇ × B = μ 0 ( J + ε 0 ∂ E ∂ t ) \nabla \times \mathbf{B}=\mu_{0}\left(\mathbf{J}+\varepsilon_{0} \frac{\partial \mathbf{E}}{\partial t}\right) ∇ × B = μ 0 ( J + ε 0 ∂ t ∂ E ) Resulting in:
f = ϵ 0 ( ∇ ⋅ E ) E + ( 1 μ 0 ∇ × B − ϵ 0 ∂ E ∂ t ) × B \mathbf{f}=\epsilon_{0}(\mathbf{\nabla} \cdot \mathbf{E}) \mathbf{E}+\left(\frac{1}{\mu_{0}} \nabla \times \mathbf{B}-\epsilon_{0} \frac{\partial \mathbf{E}}{\partial t}\right) \times \mathbf{B} f = ϵ 0 ( ∇ ⋅ E ) E + ( μ 0 1 ∇ × B − ϵ 0 ∂ t ∂ E ) × B The vector calculus identity for differentiating cross products is:
∂ ∂ t ( E × B ) = ( ∂ E ∂ t × B ) + ( E × ∂ B ∂ t ) \frac{\partial}{\partial t}(\mathbf{E} \times \mathbf{B})=\left(\frac{\partial \mathbf{E}}{\partial t} \times \mathbf{B}\right)+\left(\mathbf{E} \times \frac{\partial \mathbf{B}}{\partial t}\right) ∂ t ∂ ( E × B ) = ( ∂ t ∂ E × B ) + ( E × ∂ t ∂ B ) Using Faraday’s Law
∂ B ∂ t = − ∇ × E \frac{\partial \mathbf{B}}{\partial t}=-\nabla \times \mathbf{E} ∂ t ∂ B = − ∇ × E Plugging into the above identity gives
∂ E ∂ t × B = ∂ ∂ t ( E × B ) + E × ( ∇ × E ) \frac{\partial \mathbf{E}}{\partial t} \times \mathbf{B}=\frac{\partial}{\partial t}(\mathbf{E} \times \mathbf{B})+\mathbf{E} \times(\nabla \times \mathbf{E}) ∂ t ∂ E × B = ∂ t ∂ ( E × B ) + E × ( ∇ × E ) Hence, we can write
f = ϵ 0 [ ( ∇ ⋅ E ) E − E × ( ∇ × E ) ] − 1 μ 0 [ B × ( ∇ × B ) ] − ϵ 0 ∂ ∂ t ( E × B ) \mathbf{f}=\epsilon_{0}[(\nabla \cdot \mathbf{E}) \mathbf{E}-\mathbf{E} \times(\nabla \times \mathbf{E})]-\frac{1}{\mu_{0}}[\mathbf{B} \times(\nabla \times \mathbf{B})]-\epsilon_{0} \frac{\partial}{\partial t}(\mathbf{E} \times \mathbf{B}) f = ϵ 0 [ ( ∇ ⋅ E ) E − E × ( ∇ × E ) ] − μ 0 1 [ B × ( ∇ × B ) ] − ϵ 0 ∂ t ∂ ( E × B ) Using the last Maxwell equation, we can write this to be more symmetrical. Throw in ( ∇ ⋅ B ) B ) (\nabla \cdot \mathbf{B}) \mathbf{B}) ( ∇ ⋅ B ) B )
∇ ⋅ B = 0 \nabla \cdot \mathbf{B}=0 ∇ ⋅ B = 0 We can simplify the above equation using another vector calculus identity:
∇ ( A ⋅ B ) = A × ( ∇ × B ) + B × ( ∇ × A ) + ( A ⋅ ∇ ) B + ( B ⋅ ∇ ) A \nabla(\mathbf{A} \cdot \mathbf{B})=\mathbf{A} \times(\nabla \times \mathbf{B})+\mathbf{B} \times(\nabla \times \mathbf{A})+(\mathbf{A} \cdot \nabla) \mathbf{B}+(\mathbf{B} \cdot \nabla) \mathbf{A} ∇ ( A ⋅ B ) = A × ( ∇ × B ) + B × ( ∇ × A ) + ( A ⋅ ∇ ) B + ( B ⋅ ∇ ) A This becomes
∇ ( E 2 ) = 2 ( E ⋅ ∇ ) E + 2 E × ( ∇ × E ) \nabla\left(E^{2}\right)=2(\mathbf{E} \cdot \nabla) \mathbf{E}+2 \mathbf{E} \times(\nabla \times \mathbf{E}) ∇ ( E 2 ) = 2 ( E ⋅ ∇ ) E + 2 E × ( ∇ × E ) so
E × ( ∇ × E ) = 1 2 ∇ ( E 2 ) − ( E ⋅ ∇ ) E \mathbf{E} \times(\nabla \times \mathbf{E})=\frac{1}{2} \nabla\left(E^{2}\right)-(\mathbf{E} \cdot \nabla) \mathbf{E} E × ( ∇ × E ) = 2 1 ∇ ( E 2 ) − ( E ⋅ ∇ ) E A similar derivation is done for B \mathbf{B} B
f = ϵ 0 [ ( ∇ ⋅ E ) E + ( E ⋅ ∇ ) E ] + 1 μ 0 [ ( ∇ ⋅ B ) B + ( B ⋅ ∇ ) B ] − 1 2 ∇ ( ϵ 0 E 2 + 1 μ 0 B 2 ) − ϵ 0 ∂ ∂ t ( E × B ) \begin{aligned} \mathbf{f}=& \epsilon_{0}[(\nabla \cdot \mathbf{E}) \mathbf{E}+(\mathbf{E} \cdot \nabla) \mathbf{E}]+\frac{1}{\mu_{0}}[(\nabla \cdot \mathbf{B}) \mathbf{B}+(\mathbf{B} \cdot \nabla) \mathbf{B}] \\ &-\frac{1}{2} \nabla\left(\epsilon_{0} E^{2}+\frac{1}{\mu_{0}} B^{2}\right)-\epsilon_{0} \frac{\partial}{\partial t}(\mathbf{E} \times \mathbf{B}) \end{aligned} f = ϵ 0 [ ( ∇ ⋅ E ) E + ( E ⋅ ∇ ) E ] + μ 0 1 [ ( ∇ ⋅ B ) B + ( B ⋅ ∇ ) B ] − 2 1 ∇ ( ϵ 0 E 2 + μ 0 1 B 2 ) − ϵ 0 ∂ t ∂ ( E × B ) Which has some symmetry, but is somewhat tedious to look at. Using the Maxwell stress tensor: , which has two indicies
T i j ≡ ϵ 0 ( E i E j − 1 2 δ i j E 2 ) + 1 μ 0 ( B i B j − 1 2 δ i j B 2 ) T_{i j} \equiv \epsilon_{0}\left(E_{i} E_{j}-\frac{1}{2} \delta_{i j} E^{2}\right)+\frac{1}{\mu_{0}}\left(B_{i} B_{j}-\frac{1}{2} \delta_{i j} B^{2}\right) T i j ≡ ϵ 0 ( E i E j − 2 1 δ i j E 2 ) + μ 0 1 ( B i B j − 2 1 δ i j B 2 ) The divergence of T ↔ \stackrel{\leftrightarrow}{\mathbf{T}} T ↔
( ∇ ⋅ T ↔ ) j = ϵ 0 [ ( ∇ ⋅ E ) E j + ( E ⋅ ∇ ) E j − 1 2 ∇ j E 2 ] + 1 μ 0 [ ( ∇ ⋅ B ) B j + ( B ⋅ ∇ ) B j − 1 2 ∇ j B 2 ] \begin{aligned}(\nabla \cdot \stackrel{\leftrightarrow}{\mathbf{T}})_{j}=& \epsilon_{0}\left[(\nabla \cdot \mathbf{E}) E_{j}+(\mathbf{E} \cdot \nabla) E_{j}-\frac{1}{2} \nabla_{j} E^{2}\right] \\ &+\frac{1}{\mu_{0}}\left[(\nabla \cdot \mathbf{B}) B_{j}+(\mathbf{B} \cdot \nabla) B_{j}-\frac{1}{2} \nabla_{j} B^{2}\right] \end{aligned} ( ∇ ⋅ T ↔ ) j = ϵ 0 [ ( ∇ ⋅ E ) E j + ( E ⋅ ∇ ) E j − 2 1 ∇ j E 2 ] + μ 0 1 [ ( ∇ ⋅ B ) B j + ( B ⋅ ∇ ) B j − 2 1 ∇ j B 2 ] and thus the force per volume is written in the elegant form:
f = ∇ ⋅ T ↔ − ϵ 0 μ 0 ∂ S ∂ t \mathbf{f}=\nabla \cdot \stackrel{\leftrightarrow}{\mathbf{T}}-\epsilon_{0} \mu_{0} \frac{\partial \mathbf{S}}{\partial t} f = ∇ ⋅ T ↔ − ϵ 0 μ 0 ∂ t ∂ S where S \mathbf{S} S
Integrating both sides, we have
F = ∮ S T ↔ ⋅ d a − ϵ 0 μ 0 d d t ∫ V S d τ \mathbf{F}=\oint_{\mathcal{S}} \stackrel{\leftrightarrow}{\mathbf{T}} \cdot d \mathbf{a}-\epsilon_{0} \mu_{0} \frac{d}{d t} \int_{\mathcal{V}} \mathbf{S} d \tau F = ∮ S T ↔ ⋅ d a − ϵ 0 μ 0 d t d ∫ V S d τ If no energy is leaving or entering, we can say the system is static. Then, we have that
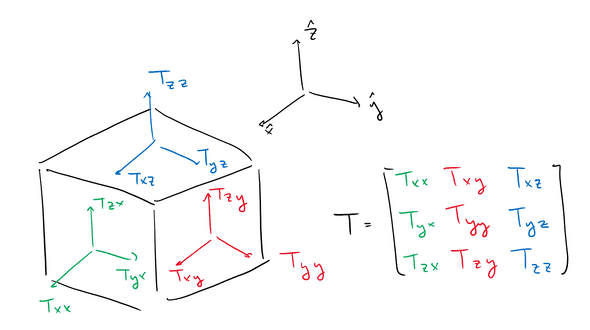
F = ∮ S T ↔ ⋅ d a ( static ) \mathbf{F}=\oint_{\mathcal{S}} \stackrel{\leftrightarrow}{\mathbf{T}} \cdot d \mathbf{a} \quad(\text { static }) F = ∮ S T ↔ ⋅ d a ( static ) T ↔ \stackrel{\leftrightarrow}{\mathbf{T}} T ↔ i = ( x , y , z ) i = (x, y, z) i = ( x , y , z ) i i i j = ( x , y , z ) j = (x, y, z) j = ( x , y , z ) j j j
In summary:
The first index i i i The second index j j j In a matrix this would be written as:
T ↔ = [ T x x T x y T x z T y x T y y T y z T z x T z y T z z ] \stackrel{\leftrightarrow}{\mathbf{T}} = \left[\begin{array}{lll}{T_{x x}} & {T_{x y}} & {T_{x z}} \\ {T_{y x}} & {T_{y y}} & {T_{y z}} \\ {T_{z x}} & {T_{z y}} & {T_{z z}}\end{array}\right] T ↔ = ⎣ ⎡ T x x T y x T z x T x y T y y T z y T x z T y z T z z ⎦ ⎤
Suppose I would like to know what is the stress for a given surface , not all surfaces like the stress tensor. This is a stress vector , and you simply get it by taking a dot product with your desired surface . The reason it is to the right, is because we are summing over the first index which has information about the surfaces, and we want to project surface normal vectors to surface normal vectors.
What is the stress in the n \mathbf{n} n
σ = T ↔ ⋅ n ^ = [ T x x T x y T x z T y x T y y T y z T z x T z y T z z ] [ n x n y n z ] = [ T x x n x + T x y n y + T x z n z T y x n x + T y y n y + T y z n z T z x n x + T z y n y + T z z n z ] \boldsymbol{\sigma} = \stackrel{\leftrightarrow}{\mathbf{T}} \cdot \hat{\mathbf{n}} = \left[\begin{array}{lll}{T_{x x}} & {T_{x y}} & {T_{x z}} \\ {T_{y x}} & {T_{y y}} & {T_{y z}} \\ {T_{z x}} & {T_{z y}} & {T_{z z}}\end{array}\right] \begin{bmatrix}n_{x} \\ n_{y} \\ n_{z}\end{bmatrix} = \begin{bmatrix} T_{xx} n_x+ T_{xy} n_y + T_{xz}n_z\\ T_{yx} n_x+ T_{yy} n_y + T_{yz}n_z\\ T_{zx} n_x+ T_{zy} n_y + T_{zz}n_z\\\end{bmatrix} σ = T ↔ ⋅ n ^ = ⎣ ⎡ T x x T y x T z x T x y T y y T z y T x z T y z T z z ⎦ ⎤ ⎣ ⎡ n x n y n z ⎦ ⎤ = ⎣ ⎡ T x x n x + T x y n y + T x z n z T y x n x + T y y n y + T y z n z T z x n x + T z y n y + T z z n z ⎦ ⎤ What if we want to know the total force? Recall that stress is force per area. Therefore, we can integrate the individual stresses over a surface d a d \mathbf{a} d a d a = n ^ d S d \mathbf{a} = \hat{\mathbf{n}} dS d a = n ^ d S
F = ∮ S T ↔ ⋅ d a ( static ) \mathbf{F}=\oint_{\mathcal{S}} \stackrel{\leftrightarrow}{\mathbf{T}} \cdot d \mathbf{a} \quad(\text { static }) F = ∮ S T ↔ ⋅ d a ( static ) which is the net force in the static case!